|
|
| Der Steuermann eines Modell-Uboots steht im Gegensatz zu
seinem Pendant im Original vor dem Problem, nicht genau zu wissen,
wie tief sein Boot im Moment ist und ob es schräg oder gerade
im Wasser liegt. Auch bei ideal klarem Wasser sorgt die Lichtbrechung
an der Oberfläche dafür, daß er die Fahrtiefe
nur sehr schlecht schätzen kann und Veränderungen erst
(zu) spät erkennt. Dazu kommt, das die Bewegungen eines
Modells deutlich schneller sind, als die eines Originals und
dem Steuermann weniger Reaktionszeit bleibt. Das Resultat dieses Wahrnehmungsdefizits ist im Regelfall ein delphinartiger Schwimmstil, bei dem das Uboot in mehr oder weniger regelmäßigen Abständen die Wasseroberfläche durchbricht. Gerade bei den ersten Tauchversuchen kommt es oft nicht zum Durchbrechen der Oberfläche, weil das Modell nach dem ersten steilen Abtauchen im schlammigen Boden steckt. |
 |
 |
Dieses Wahrnehmungsproblem löst der automatische Lage- und Tiefenregler, indem er mit seinen Sensoren die Lage des Bootes erfaßt und automatisch gegensteuert, wenn eine Änderung eintritt. FunktionsprinzipGenau wie der Tiefenrudergänger des Originals steuert
die Automatik auf der Basis von 2 Informationsquellen: der Druck
um das Boot gibt über die Tiefe Aufschluß und ein
Neigungssensor über die momentane Lage. |
| Die Solltiefe wird vom Sender aus vorgegeben, wobei Knüppelmittelstellung etwa 0,3 m Tiefe (Abstand Drucksensor - Oberfläche) entspricht, was für die meisten Modell-Uboote Sehrohrtiefe ist. Größere Tauchtiefe wird durch Verschieben des Steuerknüppels nach vorne erreicht, geringere durch Ziehen. Dabei werden die Signale so verarbeitet, daß in den Knüppelendstellungen der Einfluß des Reglers die Ruder nicht mehr in Neutralstellung bringen kann. Das Boot wird also unabhängig vom Regler steigen beziehungsweise fallen. So behält der Steuermann immer die Oberhand. | |
 |
für welche Uboote?
|
VorraussetzungenDamit der in Silizium gegossene Tiefenrudergänger seine
Arbeit zur Zufriedenheit seines Vorgesetzten leisten kann, muß
das Boot vom Ballast her im Schwebezustand sein und darf möglichst
keine Lastigkeiten aufweisen, muß also horizontal schweben.
Je näher das Boot an diesen Idealbedingungen ist, um so
leichter ist seine Arbeit. |
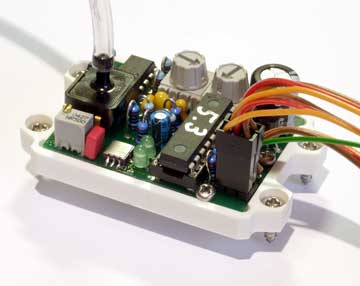
Der Tiefenregler wird zwischen Empfänger und Tiefenruderervo gestöpselt.Er hat ein servoähnliches Gehäuse und kann zum Beispiel unmittelbar neben dem Tiefenruderservo montiert werden. Da der Regler einen Lagesensor enthält, der den Winkel des Bootes zur Wasserlinie mißt, muß er fest mit dem Boot verbunden werden. Der Tiefenruderservo muß zwei wesentliche Forderungen erfüllen: Er muß spielarm sein und er muß dem Dauerstreß gewachsen sein, den die permanente Bewegung verursacht. |
| LageregelBriefmarke LR3 | Lage- und Tiefenregler LTR5.3 |